סוגי מרווחי צד (מוגדרים לכל הילוך בסט ההילוכים)
יש לבצע הילוכים אמיתיים עם מרווחים לרוחב מיוחדים המותרים. קבע ערכים קבילים על סמך תנאי ההפעלה שלך.
בהילוכים גליליים וסליים קיימות שתי שיטות לקביעת ערך המרווח לרוחב הנדרש. ראשית, צמצמו את עובי השן על ידי טבילת האגרוף בתבנית ריקה לעומק החורג מהתקן המקובל מבחינה תיאורטית. שנית, הגדל את מרחק המרכז בהשוואה לחישוב תיאורטי.
כשאתה מגדיר את המרווח הצדדי, שקול את הגורמים הבאים:
- שטח נדרש לשימון.
- התרחבות דיפרנציאלית בין רכיבי ההילוכים והארז.
- שגיאות בחישובים. אי ספיקת שני הגלגלים, שגיאות בפרופיל, המגרש, עובי השן, זווית השן ומרחק המרכז. ככל שמרווח הצד קטן יותר, עיבוד ההילוכים יהיה מדויק יותר.
- תנאי הפעלה, כגון היפוך או עומס יתר בתדירות גבוהה.
גודל המרווח לרוחב לא אמור להיות גדול מדי בכדי לעמוד בדרישות העבודה. וודא שזה מספיק כדי שעלות העיבוד שבבי לא תעלה על ההכרחי.
באופן מסורתי, חצי מערך הסובלנות למרווח הצד מוגדר לעובי השיניים של כל הילוך מהזוג. עם זאת, ישנם יוצאים מן הכלל. לדוגמה, בהילוכים עם מספר שיניים מועט משתמשים בכל הערכים המותרים להילוך המונע. כתוצאה מכך, שן ההילוכים אינה נחלשת.
- מרווח רוחבי עגול j t [מ"מ / אינץ ']
- מרווח רוחבי רגיל j n [mm / inch]
- מרווח רוחבי מרכזי j r [mm / inch]
- אישור רוחבי Θ [בָּרָד]
| סוגי הילוכים | הקשר בין הכיוון המעגלי j t לכיוון הרגיל j n | הקשר בין הכיוון המעגלי j t לכיוון המרכזי j r | הקשר בין הכיוון המעגלי j t לבין המרווח הרוחבי הזוויתי j Θ |
|---|---|---|---|
| להניע הילוך | j n \u003d j t cos α | ||
| הילוך שלוחה סליל | j nn \u003d j tt cos α n cos β |
|
|
|

מרווח לרוחב הילוך סלילי
עבור הילוכים סליליים ישנם שני סוגים של מרווחים לרוחב הקשורים למרווח השן. יש חתך בכיוון הרגיל של משטח השן "n" וחתך רוחב בכיוון הניצב לציר "t".

|
j nn |
מרווח רוחבי בכיוון הניצב למשטח השן |
|
j nt |
מרווח רוחבי בכיוון מעגלי בחתך רוחב בניצב לשן |
|
j tn |
מרווח רוחבי בכיוון הניצב למשטח השן בחתך רוחב בניצב לציר |
|
j tt |
מרווח רוחבי בכיוון מעגלי בניצב לציר |
|
במישור הרגיל לשן: |
j nn \u003d j nt cos α n |
משימה ונתונים ראשוניים לחישוב
עבור זוג הילוכים נתון, קבע את מידת הדיוק בהתאם לנורמות של דיוק קינמטי, חלקות ומגע; להקצות מערך של אינדיקטורים מבוקרים ולקבוע את הערכים המספריים הסטנדרטיים של סובלנות וסטיות גבול עבור כל אחד מהמחוונים המבוקרים.
בצע ציור עבודה של ציוד אחד בהתאם לדרישות התקנים.
פרמטרי ההילוכים מוצגים בטבלה. 1.
חישוב הפרמטרים הראשוניים
מרחק המרכז aW מחושב על ידי הנוסחה:
כאשר d1 ו- d2 הם קוטר ההילוכים והגלגלים בהתאמה.
aW \u003d (69 + 150) / 2 \u003d 110 מ"מ.
חישוב פרמטרי הילוכים.
על פי הטבלה. 5.12 ו- 5.13 אנו מקצים את התואר השמיני לדיוק ההעברה, מכיוון שהמהירות ההיקפית נמוכה, כמו גם הכוחות המשודרים. דרגת דיוק זו מסומנת כמשומשת ביותר.
הקצה קבוצה של מחווני דיוק באמצעות חומר הטבלה. 5.6., 5.7., 5.9., 5.10., הקצאה:
סובלנות לביצוע רדיאלי של ציוד הטבעת Fr:
סובלנות קינמטית מקומית f "i סובלנות:
סובלנות להגבלת סטיות של צעד fpt:
fpt \u003d ± 20 מיקרומטר;
סובלנות לפרופיל ff:
תן לנקודת המגע הכוללת את הפרמטרים הבאים:
רוחב הילוכים הטבעת bW הוא לפחות 50% לאורך גובה השן ולפחות 70% לאורך השן - אז זה נכון:
סובלנות לא מקבילה fX:
סובלנות ציר fY:
סובלנות לכיוון השן Fb:
חספוס שיניים RZ:
המרווח לרוחב המינימלי מחושב לפי האלגוריתם בדוגמה בפרק 5.3. :
כאשר jn1 ו- jn2 הם המונחים 1 ו -2 בהתאמה.
כאשר a הוא המרחק המרכזי, מ"מ;
aР1, aР2 - מקדמי התפשטות תרמית, בהתאמה, עבור הילוכים ודיור, 1 / ° С;
t1, t2 - טמפרטורות מגבילות שעבורם מחושב המרווח הרוחבי של ההילוכים והדיור, בהתאמה, ° С; קח לפי המשימה t1 \u003d 50, t2 \u003d 35.
jn min \u003d 59 מיקרומטר. לכן, שימוש בטבלה. 5.17., אנו לוקחים את צורת ההתאמה C וכיתה IV של הסטייה של המרחק המרכזי. ואז הסטייה המרבית של מרחק המרכז:
המרווח לרוחב המרבי האפשרי נקבע על ידי הנוסחה:
jn max \u003d jn min + 0.684 (TH1 + TH2 + 2fa),
כאשר TH1, TH2 הוא הסובלנות לקיזוז קווי המתאר המקוריים;
fa - הסטייה המקסימאלית של הדו-ציר.
jn מקסימום \u003d 325 מיקרומטר.
הקצה מתחם בקרה למיקום היחסי של פרופילי שיניים מנוגדים. לעניין זה, מלוח 5.30. אנו לוקחים את אורך ה- W הכללי הרגיל עם m \u003d 3 ו- zn \u003d 2 - מספר השיניים הנשלטות בו זמנית.
רוחב \u003d 10.7024 מ"מ;
רוחב \u003d m * רוחב \u003d 23.1072 מ"מ.
הסטייה העליונה EW ms, מיקרון:
EW ms \u003d EW ms1 + EW ms2,
כאשר EW ms1, EW ms2 הוא הקיזוז הנוסף הקטן ביותר של קווי המתאר המקוריים, בהתאמה, מונח 1 ו -2:
EW ms \u003d 71 מיקרומטר.
סובלנות לאורכו הממוצע של הנורמלי הכללי:
![]() .
.
תוצאה זו מוצגת ברישום.
בנוסף
תכנון טכנולוגיית תיקון צילינדרים הידראוליים באמצעות חומרים פולימריים
אחד הכיוונים להגברת יעילות הייצור הוא הציוד המחודש שלו עם הטכנולוגיה המודרנית, הכנסת תהליכים טכנולוגיים מתקדמים והישגי המדע המודרני. בענף היערות והייעור, כיוון זה, יחד עם הגדלת קיבולת היחידה של התוצרת ...
סייברנטיקה וסינרגטיקה - מדעים אודות מערכות התארגנות עצמית
חזית המדע המודרני משתרעת ממושגים קונקרטיים באופן יחסי ביחס לתחומים שונים בעולם הפיזי והכימי, וכלה בתיאוריות העמוקות ביותר, המכסה תחומי טבע שונים, חברה ופעילות טכנית אנושית. האחרון צריך לכלול סייברנטיקה ו ...
M.V. אברמצ'וק
מנחה - דוקטור למדעים טכניים, פרופסור B.P. טימופייב
המאמר משווה בין התקנים ISO / TR 10064-2: 1996 ו- GOST 1643-81 מבחינת ארגון הרגולציה והבקרה על אישור הרוחב בהילוכים. משווה גם את ערכי הסילוק לרוחב המינימליים בשני התקנים הללו.
מבוא
קחו למשל את הדו"ח הטכני "הילוכים גליליים ISO / TR 10064-2. מדריך מעשי לקבלה. חלק 2: מעקב אחר סטיות רדיאליות מוחלטות, מסלול ריצה, עובי שן ופינוי. " במקביל נתחיל בנספח א ', שכותרתו "פינוי רוחבי וסובלנות בעובי השן". נשווה בעקביות את הוראות הנספח האמור לעיל לסעיף 3 לתקן הבסיסי GOST 1643-81 "תקנים של אישור לרוחב".
בקרת מרווח צד
תקן ISO / TR 10064-2 מכיל המלצות לנרמלת המרווח הרוחבי של ההתאמה ועובי שיני הגלגלים. יתר על כן, כל מה שצוין בתקן הוא מייעץ, בעוד שהנורמות שניתנו בתקן המקומי GOST 1643-81 היו חובה.
הפסקה הראשונה בנספח A לתקן ISO / TR 10064-2 מספקת שיטה לבחירת סבילות לעובי השן ומרווח רוחבי מינימלי. בנוסף, ניתנות שיטת חישוב המרווח לרוחב המרבי המשוער בהילוך והערכים המומלצים של המרווח לרוחב המינימלי. GOST 1643-81 קובע את הנורמות של אישור לרוחב ומספק טבלאות עם ערכי הנורמות המתאימות. אין שיטות חישוב הדומות לאלה שניתנו בהמלצות תקן ISO / TR 10064-2 בתקן GOST 1643-81.
הפסקה השנייה בתקן ISO / TR 10064-2 מגדירה את המרווח לרוחב ומספקת את הרציונל לגודלו הנדרש. עוד נאמר כי "המרווח הרוחבי במעורבות משתנה במהלך פעולת התמסורת בגלל שינויים במהירות הגלגל, הטמפרטורה, העומס וכו '." . התקן שלנו אינו מכיל הגדרה של אישור רוחבי ותנאים לתפקוד ההולכה, הגורם לשינויו.
הפיסקה השלישית בנספח A לתקן ISO / TR 10064-2 נקראת "עובי שיניים מירבי לגלגלים". זה נותן הגדרה של מושג זה. GOST 1643-81 אינו מכיל הסברים על עובי מקסימאלי של שן גלגל: ניתנים רק טבלאות עם סיבולת Ecs (הסטייה הקטנה ביותר בעובי השן) ו- Tc (סובלנות לעובי השן).
הפסקה הרביעית בנספח A לתקן ISO / TR 10064-2 עם הכותרת "אישור לרוחב מינימלי" מגדירה את המרווח לרוחב המינימלי ומתאר את הצורך בפירור רוחבי מינימלי - "זהו מה שמכונה" סובלנות לרוחב לרוחב "המסורתי שנוצר על ידי המעצב מפצה על:
(א) טעויות דיור ונשיאה, הסטת פיר;
(ב) כיוון מוטעה של סרני הגלגלים עקב שגיאות בתא ובמרווחים במיסבים;
(ג) יישור שגוי של הסרנים בגלל שגיאות דיור ומרווחיות נושאות;
(ד) טעויות התקנה, כגון אקסצנטריות של פיר;
(ה) הפעלת תומכים;
(ו) השפעות טמפרטורה (פונקציה של הפרש הטמפרטורה בין המארז לגורמי הגלגל, מרחק המרכז והבדל החומרים);
(ז) עלייה בכוח הצנטריפוגלי של היסודות המסתובבים;
(ח) גורמים אחרים, כגון זיהום חומר סיכה וגידול בגודל החלקים הלא מתכתיים של הגלגל. "
נאמר גם כי "הערך של המרווח לרוחב המינימלי עשוי להיות קטן, בתנאי שהגורמים לעיל נשלטים. ניתן להעריך כל אחד מהגורמים באמצעות ניתוח הסבולות ואז לחשב את דרישות המינימום. "
המלצות תקן ISO / TR 10064-2: 1996 מחייבות אותנו לקחת בחשבון את השגיאות של רכיבי הילוכים שאינם שיניים, כמו גם את תנאי ההפעלה, בעת חישוב סבילות הרווח לרוחב, דבר שלא נלקח בחשבון בתקן הבסיסי הנוכחי GOST 1643-81. מומחים פנים רבים דיברו על החיסרון הזה בסטנדרט שלנו, במיוחד B.P. טימופייב (ראו למשל). יש צורך לבצע סטנדרטיזציה של חישוב המרווח לרוחב על סמך עבודות ניסוי נרחבות עקב אי-דיוק וחוסר העקביות של ההמלצות הקיימות.
באופן כללי, התקן הבסיסי GOST 1643-81 מנרמל את המרווח לרוחב כדלקמן. סוג ההתאמה בין שיני הגלגלים בתיבת ההילוכים מאופיין בסלול הרוחב הקטן ביותר המובטח jn. הדרישות לסילוק לרוחב נקבעות ללא קשר לדיוק בייצור ההילוכים. התקן קובע את מרווח הצד המובטח (הקטן ביותר) בהילוך jn min - מרווח הצד הקטן ביותר שנקבע, והסובלנות בפינוי הצד Tjn שווה להבדל בין מרווח הצד הצד המותר והגדול (הקטן ביותר). נורמות הסילוק לרוחב אינן קשורות באופן חד משמעי לתנאי התכנון ותפעול ההילוכים, מה שמביא במקרים מסוימים לחסימת ההילוכים, למרות מרווח הצד המינימלי המובטח בתקן.
בהתאם לגודל המרווח לרוחב המובטח, תקן GOST 1643-81 קובע שישה סוגים של זיווג שיניים הילוכים בהילוך: H, E, D, C, B, A ושמונה סוגי סובלנות על המרווח לרוחב, המצוינים בסדר הולך וגובר על ידי האותיות h, d, c, b, a, x, y, z. זיווג H - עם אישור האפס הקטן ביותר, E - עם קטן, C ו- D - עם צמצום, A - עם מוגבר. צימוד מסוג B מספק את הכמות המינימלית של מרווח רוחבי, שמבטל את האפשרות של חסימת העברת פלדה או ברזל יצוק לחימום כאשר הפרש הטמפרטורה בין ההילוכים למארז הוא 25 מעלות צלזיוס.
בהיעדר דרישות מיוחדות להילוכים, יש צורך להתקיים מההוראות הבאות: סוגי החברים H ו- E תואמים את סוג הסבילות למרווח לרוחב h, סוגי החברים D, C, B ו- A הם סוגי הסבולות d, c, b ו- a בהתאמה.
מותר לשנות את ההתאמה בין סוג צימוד ההילוכים בהולכה לבין סוג הסבילות למרחק רוחבי; במקרה זה, ניתן להשתמש בסוגי הסבולות x, y, z.
נקבעות גם שש מחלקות של סטיות למרחקים של צירים, המצוינות בסדר יורד של דיוק לפי הספרות הרומיות מ- I ל- VI.
דיוק ייצור ההילוכים וההילוכים נקבע על פי מידת הדיוק, והדרישות למרווח לרוחב נקבעות על פי סוג הצימוד בהתאם לנורמות המרווח הרוחבי. מרווח רוחבי מובטח בכל זוג מובטח בכפוף לשיעורי הסטיות שנקבעו למרחק הציר (ליחידות H ו- E - סוג II, וליחידות D, C, B ו- A - כיתות III, IV, V ו- VI, בהתאמה
vennו). במקרה זה, מתקבלת עקיפה של המרווח לרוחב המובטח: מצד אחד זה תלוי בסוג ההזדווגות, מצד שני, בכיתה של סטיית מרחק המרכז.
כן מצוין כי מותר לשנות את ההתאמה בין סוג הצימוד לבין סוג הסטיות של מרחק המרכז.
המרווח לרוחב המלא מורכב מרווח רוחבי מובטח, jnmin וחלק מהמרווח לרוחב, k, מה שנקרא פיצוי של הפחתת המרווח לרוחב הנובעת בגלל השגיאה בייצור הילוכים והתקנת הילוכים. גובה הפיצוי נקבע על ידי הנוסחה:
k) \u003d 4 (f 2 2sin a) 2 + 2fP \\ + 2Fß + (sin a) 2 + (fy sin a) 2,
כאשר fa הוא הסטייה המרבית של המרחק הבין-צבי, fPb הוא הסטייה המקסימאלית של המגרש של האירוסין, Fß הוא השגיאה בכיוון הפרופיל, fx הוא הסובלנות להקבלה של הצירים, fy הוא הסובלנות להתאמה לא נכונה של הצירים, והיא זווית ההילוכים של ההילוכים.
בעת קביעת k, לא נלקח בחשבון ההפעלה הרדיאלית של גלגל השיניים הטבעתי, Frr, ובמספר שיניים מרובות, כל תערוכה של תמהויות גלגלים אינה שוללת את המצב כאשר המרווח הרוחבי jn בהילוכים ייקבע על ידי גורם זה.
הפיסקה הרביעית שהוזכרה כבר בנספח A לתקן ISO / TR 10064-2 מספקת טבלה עם ערכי פינוי צד מינימליים המומלצים עבור כוננים תעשייתיים עם גלגלי מתכת ברזלית בתאי מתכת ברזליות הפועלים במהירויות היקפיות פחות מ -15 מטר / שניות, שניות מסחרי טיפוסי (המונח של המקור, המונח "צליל מבחינה כלכלית" מקובל יותר כאן) ייצור סבילות למארזים, פירים ומסבים.
הבה נשווה בין ערכי המרווח לרוחב המינימלי ב- ISO / TR 10064-2 ו- GOST 1643-81, תוך התחשבות בעובדה שב- ISO / TR 10064-2 ערך הסילוק תלוי במודולוס השן mn ובמרחק האינטקסיאלי המינימלי, ואילו הסטנדרט שלנו - מסוג הצימוד והמרחק המרכזי aw. אנו לוקחים את סוג ההזדווגות B עבור מודולי השיניים בטווח mn \u003d (1.5-5) מ"מ וסוג ההזדווגות A, עבור המודולים mn \u003d (12-18) מ"מ. התוצאות מסוכמות בטבלה. ערכים מודגשים של אישור רוחבי מובטח נלקח מ- GOST 1643-81.
mn, mm מרחק מרכזי מינימלי, mm
50 100 200 400 800 1600
1,5 90 120 110 140 - - - -
3 120 120 140 140 170 185 240 230 - -
5 - 180 140 210 185 280 230 - -
12 - - 350 290 420 360 550 500 -
18 - - - 540 360 670 500 940 780
שולחן. השוואה בין ערכי המרווח לרוחב המינימליים בתקן ISO / TR 10064-2 ו- GOST
כפי שניתן לראות מהטבלה, עם מודול שיניים mn \u003d 3 מ"מ, המרווח לרוחב המינימלי ב- ISO / TR 10064-2 והמרווח הרוחבי המובטח ב- GOST 1643-81
כמעט חופפים זה לזה. בשעה mn<3 минимальный боковой зазор по ISO/TR 10064-2 меньше, чем в ГОСТ 1643-81, mn>עוד 3.
ניתן לחשב את הערכים המופיעים בטבלה הסטנדרטית ב- ISO / TR 10064-2 באמצעות הביטוי:
GOST 1643-81 אינו מכיל תלות לחישוב ערכי הרווחיות לרוחב מובטחת, jnmin.
גם בפסקה הרביעית של ISO / TR 10064-2 ניתנת נוסחה לחישוב המרווח לרוחב:
כאשר EtSH1 ו- ETsPts2 הם הסטייה העליונה של עובי שן ההילוכים והגלגל, בהתאמה, ו- ap הוא זווית הפרופיל תקינה.
"פח הדק ושיעור המרווח הרדיאלי של ההילוכים והגלגל שווים, והערך של מקדם החפיפה הוא מקסימאלי." בניגוד לתקן ISO / TR 10064-2, ב- GOST 1643-81, החריגות הקטנות ביותר בעובי שן ההגה וההילוך לא יכולות להיות שוות, מכיוון שהן תלויות בקוטר המגרש, הערכים שבהם ההילוכים וההילוכים שונים.
הנקודה החמישית בתקן ISO / TR 10064-2: 1996 מוקדשת לנורמליזציה של עובי השן. בפרט בו ניתנות המלצות על קביעת עובי השן המרבי והמינימלי. בתקן GOST 1643-81 הרגיל שלנו, הנושא של נורמליזציה של עובי השן, בנוסף לערכי טבלאות של הסטייה הקטנה ביותר של עובי השן וסובלנות לעובי השן, אינו מטופל.
הסעיף השישי בתקן ISO / TR 10064-2 מכיל המלצות לתקנן מרווח רוחבי מרבי. ההגדרה של פרמטר דיוק זה ניתנת - "המרווח לרוחב המרבי בהנעת ההילוכים, jbnmax הוא סכום הסבילות לעובי השן, השפעת הסטיות של מרחק הסרן והשפעת הסטיות של גיאומטריה של השן והתנאי להתרחשותו:" המרווח הרוחבי המרבי התיאורטי מתרחש כאשר שני הילוכים באיכות גבוהה גלגלים שנעשו בהתאם לנורמה של עובי המינימום של השן מרושתים על המרחק המרבי המותר חופשי במרכז. " נוסחאות ניתנות לחישוב עובי השן המינימלי בפועל והמרווח הרוחבי ההיקפי המרבי, כמו גם הנוסחה להמרת המרווח היקפי למרווח הרוחבי הרגיל. נאמר גם כי "כל סטיות ייצור של השן תגדיל את המרווח הרוחבי המוערך. כדי להעריך ערכים מקובלים, נדרשת עבודת מחקר רצינית על בסיס מספר גדול של ניסויים. " מודגש כי "אם ברצונך לשלוט על המרווח לרוחב המרבי, עליך לבצע מחקר מעמיק של כל אחד ממרכיביו ומידת הדיוק שנבחרה המגביל את הסטיות של הגיאומטריה של שן הגלגל." הנורמליזציה של המרווח לרוחב המרבי ב- GOST 1643-81 מצטמצמת לערכי המרווח לרוחב מובטח, jnmin, והסובלנות למרווח רוחבי G, מומלץ לקבל מהביטוי:
הוראות תקן ISO / TR 10064-2 הינן מהוות ייעוץ, הוא אינו מכיל נתונים ספציפיים על תקינה. כמדדי אישור,
כאשר ТН1 ו- ТН2 הם סבולות לעקירה של גלגל ההילוכים והמתאר הראשוני.
משתמשים בערכי Esns ו- Tsn (סטייה עליונה בעובי השן וסובלנות בעובי שן הגלגלים). יש לנו א.ק.ס (הסטייה הקטנה ביותר בעובי השן) ו- Tc (סובלנות לעובי השן). הערכים של Esns ו- Tsn בתקן ISO / TR 10064-2 אינם סטנדרטיים ורק המלצות ניתנות לגבי שיטות לקביעתן. לפיכך, אימוץ המלצות אלה ללא פיתוח תקנים סטנדרטיים המספקים אישור לרוחב, פירושו דחיית השימוש בשיטות ובאמצעי המדידה של כל המדדים הניתנים בתקן שלנו, כלומר:
EHs (קיזוז נוסף הקטן ביותר של קווי המתאר המקורי);
Ewms (סטייה קטנה ביותר מהאורך הממוצע של הנורמלי הכללי);
איסלמות (סטייה הקטנה ביותר באורך הנורמלי הנפוץ);
Ea "" s (סטיית גבול עליונה של מרחק מרכז המדידה) ואחרים.
ההמלצות בתקן ISO / TR 10064-2 אינן מחברות את גודל הפער והנורמליזציה שלהן עם סוג ההזדווגות, סוג הסובלנות לפער לרוחב או עם סוג הסטייה של מרחק המרכז. עם זאת, הם דורשים חשבונאות חובה על טעויות בייצור והתקנה של חלקי הילוכים ללא הילוכים (מעטה, פירים, מיסבים וכו '), תנאי הילוכים, כמו גם סוג חומר סיכה, זיהומו, נוכחות של חלקים לא מתכתיים של הגלגלים ואלמנטים אחרים.
סיכום
בחינה מפורטת של תקן ISO / TR 10064-2: 1996 והשוואתו עם GOST 1643-81 מביאה אותנו למסקנה כי דחוף לפתח תקן ביתי המכיל סיבוכים ספציפיים לערכים מנורמליים, המאפשר שימוש מלא בציוד קיים לניטור הילוכים והילוכים. . על מסמך הרגולציה שצוין, בניגוד ל- GOST 1643-81, לעמוד בעקרונות הבסיסיים של המלצות תקן ISO. אי אפשר לארגן את ייצור ההילוכים וההילוכים רק על בסיס המלצות ISO מבלי להשתמש בתקן המקומי. התקן הקיים GOST 1643-81 במספר הוראות סותר באופן ישיר את ההמלצות שצוינו.
סִפְרוּת
1. ISO / TR 10064-2: 1996. הילוכים גליליים. קוד התרגול. חלק 2. בדיקה הקשורה לסטיות מרוכבות רדיאליות, מסלול ריצה, עובי שן וריסוס.
2. Timofeev B.P., Shalobaev E.V. המדינה והסיכויים לקיצוב דיוק ההילוכים וההילוכים. // עלון הנדסת מכונות. מס '12. 1990. ש' 34-36.
3. טישצ'נקו O.F., וולידינסקי א.ס. החלפות, סטנדרטיזציה ומדידות טכניות. M .: הנדסה, 1977.
4. Timofeev B.P., Shalobaev E.V. קביעת סוג הצימוד בהעברת ההילוכים ורגולציה של נורמות מרווח הצד. // שירות מטרולוגי בברית המועצות. מ .: הוצאה לאור של תקנים. 1990. גיליון. 2, עמ '27-31.
5. GOST 1643-81. הילוכים גליליים. סובלנות. מ., הוצאת תקנים, 1989.
6. יורייב Yu.A., Murashev V.A., Shalobaev E.V. הבחירה בסוג ההתאמה וההערכה ההסתברותית של התנועה המתה של ההולכה. L .: LITMO., 1977.28 ש '.
M.V. אברמצ'וק
מנחה - דוקטור למדעים טכניים, פרופסור B.P. טימופייב
המאמר משווה בין התקנים ISO / TR 10064-2: 1996 ו- GOST 1643-81 מבחינת ארגון הרגולציה והבקרה על אישור הרוחב בהילוכים. משווה גם את ערכי הסילוק לרוחב המינימליים בשני התקנים הללו.
מבוא
קחו למשל את הדו"ח הטכני "הילוכים גליליים ISO / TR 10064-2. מדריך מעשי לקבלה. חלק 2: מעקב אחר סטיות רדיאליות מוחלטות, מסלול ריצה, עובי שן ופינוי. " במקביל נתחיל בנספח א ', שכותרתו "פינוי רוחבי וסובלנות בעובי השן". נשווה בעקביות את הוראות הנספח האמור לעיל לסעיף 3 לתקן הבסיסי GOST 1643-81 "תקנים של אישור לרוחב".
בקרת מרווח צד
תקן ISO / TR 10064-2 מכיל המלצות לנרמלת המרווח הרוחבי של ההתאמה ועובי שיני הגלגלים. יתר על כן, כל מה שצוין בתקן הוא מייעץ, בעוד שהנורמות שניתנו בתקן המקומי GOST 1643-81 היו חובה.
הפסקה הראשונה בנספח A לתקן ISO / TR 10064-2 מספקת שיטה לבחירת סבילות לעובי השן ומרווח רוחבי מינימלי. בנוסף, ניתנות שיטת חישוב המרווח לרוחב המרבי המשוער בהילוך והערכים המומלצים של המרווח לרוחב המינימלי. GOST 1643-81 קובע את הנורמות של אישור לרוחב ומספק טבלאות עם ערכי הנורמות המתאימות. אין שיטות חישוב הדומות לאלה שניתנו בהמלצות תקן ISO / TR 10064-2 בתקן GOST 1643-81.
הפסקה השנייה בתקן ISO / TR 10064-2 מגדירה את המרווח לרוחב ומספקת את הרציונל לגודלו הנדרש. עוד נאמר כי "המרווח הרוחבי במעורבות משתנה במהלך פעולת התמסורת בגלל שינויים במהירות הגלגל, הטמפרטורה, העומס וכו '." . התקן שלנו אינו מכיל הגדרה של אישור רוחבי ותנאים לתפקוד ההולכה, הגורם לשינויו.
הפיסקה השלישית בנספח A לתקן ISO / TR 10064-2 נקראת "עובי שיניים מירבי לגלגלים". זה נותן הגדרה של מושג זה. GOST 1643-81 אינו מכיל הסברים על עובי מקסימאלי של שן גלגל: ניתנים רק טבלאות עם סיבולת Ecs (הסטייה הקטנה ביותר בעובי השן) ו- Tc (סובלנות לעובי השן).
הפסקה הרביעית בנספח A לתקן ISO / TR 10064-2 עם הכותרת "אישור לרוחב מינימלי" מגדירה את המרווח לרוחב המינימלי ומתאר את הצורך בפירור רוחבי מינימלי - "זהו מה שמכונה" סובלנות לרוחב לרוחב "המסורתי שנוצר על ידי המעצב מפצה על:
(א) טעויות דיור ונשיאה, הסטת פיר;
(ב) כיוון מוטעה של סרני הגלגלים עקב שגיאות בתא ובמרווחים במיסבים;
(ג) יישור שגוי של הסרנים בגלל שגיאות דיור ומרווחיות נושאות;
(ד) טעויות התקנה, כגון אקסצנטריות של פיר;
(ה) הפעלת תומכים;
(ו) השפעות טמפרטורה (פונקציה של הפרש הטמפרטורה בין המארז לגורמי הגלגל, מרחק המרכז והבדל החומרים);
(ז) עלייה בכוח הצנטריפוגלי של היסודות המסתובבים;
(ח) גורמים אחרים, כגון זיהום חומר סיכה וגידול בגודל החלקים הלא מתכתיים של הגלגל. "
נאמר גם כי "הערך של המרווח לרוחב המינימלי עשוי להיות קטן, בתנאי שהגורמים לעיל נשלטים. ניתן להעריך כל אחד מהגורמים באמצעות ניתוח הסבולות ואז לחשב את דרישות המינימום. "
המלצות תקן ISO / TR 10064-2: 1996 מחייבות אותנו לקחת בחשבון את השגיאות של רכיבי הילוכים שאינם שיניים, כמו גם את תנאי ההפעלה, בעת חישוב סבילות הרווח לרוחב, דבר שלא נלקח בחשבון בתקן הבסיסי הנוכחי GOST 1643-81. מומחים פנים רבים דיברו על החיסרון הזה בסטנדרט שלנו, במיוחד B.P. טימופייב (ראו למשל). יש צורך לבצע סטנדרטיזציה של חישוב המרווח לרוחב על סמך עבודות ניסוי נרחבות עקב אי-דיוק וחוסר העקביות של ההמלצות הקיימות.
באופן כללי, התקן הבסיסי GOST 1643-81 מנרמל את המרווח לרוחב כדלקמן. סוג ההתאמה בין שיני הגלגלים בתיבת ההילוכים מאופיין בסלול הרוחב הקטן ביותר המובטח jn. הדרישות לסילוק לרוחב נקבעות ללא קשר לדיוק בייצור ההילוכים. התקן קובע את מרווח הצד המובטח (הקטן ביותר) בהילוך jn min - מרווח הצד הקטן ביותר שנקבע, והסובלנות בפינוי הצד Tjn שווה להבדל בין מרווח הצד הצד המותר והגדול (הקטן ביותר). נורמות הסילוק לרוחב אינן קשורות באופן חד משמעי לתנאי התכנון ותפעול ההילוכים, מה שמביא במקרים מסוימים לחסימת ההילוכים, למרות מרווח הצד המינימלי המובטח בתקן.
בהתאם לגודל המרווח לרוחב המובטח, תקן GOST 1643-81 קובע שישה סוגים של זיווג שיניים הילוכים בהילוך: H, E, D, C, B, A ושמונה סוגי סובלנות על המרווח לרוחב, המצוינים בסדר הולך וגובר על ידי האותיות h, d, c, b, a, x, y, z. זיווג H - עם אישור האפס הקטן ביותר, E - עם קטן, C ו- D - עם צמצום, A - עם מוגבר. צימוד מסוג B מספק את הכמות המינימלית של מרווח רוחבי, שמבטל את האפשרות של חסימת העברת פלדה או ברזל יצוק לחימום כאשר הפרש הטמפרטורה בין ההילוכים למארז הוא 25 מעלות צלזיוס.
בהיעדר דרישות מיוחדות להילוכים, יש צורך להתקיים מההוראות הבאות: סוגי החברים H ו- E תואמים את סוג הסבילות למרווח לרוחב h, סוגי החברים D, C, B ו- A הם סוגי הסבולות d, c, b ו- a בהתאמה.
מותר לשנות את ההתאמה בין סוג צימוד ההילוכים בהולכה לבין סוג הסבילות למרחק רוחבי; במקרה זה, ניתן להשתמש בסוגי הסבולות x, y, z.
נקבעות גם שש מחלקות של סטיות למרחקים של צירים, המצוינות בסדר יורד של דיוק לפי הספרות הרומיות מ- I ל- VI.
דיוק ייצור ההילוכים וההילוכים נקבע על פי מידת הדיוק, והדרישות למרווח לרוחב נקבעות על פי סוג הצימוד בהתאם לנורמות המרווח הרוחבי. מרווח רוחבי מובטח בכל זוג מובטח בכפוף לשיעורי הסטיות שנקבעו למרחק הציר (ליחידות H ו- E - סוג II, וליחידות D, C, B ו- A - כיתות III, IV, V ו- VI, בהתאמה
vennו). במקרה זה, מתקבלת עקיפה של המרווח לרוחב המובטח: מצד אחד זה תלוי בסוג ההזדווגות, מצד שני, בכיתה של סטיית מרחק המרכז.
כן מצוין כי מותר לשנות את ההתאמה בין סוג הצימוד לבין סוג הסטיות של מרחק המרכז.
המרווח לרוחב המלא מורכב מרווח רוחבי מובטח, jnmin וחלק מהמרווח לרוחב, k, מה שנקרא פיצוי של הפחתת המרווח לרוחב הנובעת בגלל השגיאה בייצור הילוכים והתקנת הילוכים. גובה הפיצוי נקבע על ידי הנוסחה:
k) \u003d 4 (f 2 2sin a) 2 + 2fP \\ + 2Fß + (sin a) 2 + (fy sin a) 2,
כאשר fa הוא הסטייה המרבית של המרחק הבין-צבי, fPb הוא הסטייה המקסימאלית של המגרש של האירוסין, Fß הוא השגיאה בכיוון הפרופיל, fx הוא הסובלנות להקבלה של הצירים, fy הוא הסובלנות להתאמה לא נכונה של הצירים, והיא זווית ההילוכים של ההילוכים.
בעת קביעת k, לא נלקח בחשבון ההפעלה הרדיאלית של גלגל השיניים הטבעתי, Frr, ובמספר שיניים מרובות, כל תערוכה של תמהויות גלגלים אינה שוללת את המצב כאשר המרווח הרוחבי jn בהילוכים ייקבע על ידי גורם זה.
הפיסקה הרביעית שהוזכרה כבר בנספח A לתקן ISO / TR 10064-2 מספקת טבלה עם ערכי פינוי צד מינימליים המומלצים עבור כוננים תעשייתיים עם גלגלי מתכת ברזלית בתאי מתכת ברזליות הפועלים במהירויות היקפיות פחות מ -15 מטר / שניות, שניות מסחרי טיפוסי (המונח של המקור, המונח "צליל מבחינה כלכלית" מקובל יותר כאן) ייצור סבילות למארזים, פירים ומסבים.
הבה נשווה בין ערכי המרווח לרוחב המינימלי ב- ISO / TR 10064-2 ו- GOST 1643-81, תוך התחשבות בעובדה שב- ISO / TR 10064-2 ערך הסילוק תלוי במודולוס השן mn ובמרחק האינטקסיאלי המינימלי, ואילו הסטנדרט שלנו - מסוג הצימוד והמרחק המרכזי aw. אנו לוקחים את סוג ההזדווגות B עבור מודולי השיניים בטווח mn \u003d (1.5-5) מ"מ וסוג ההזדווגות A, עבור המודולים mn \u003d (12-18) מ"מ. התוצאות מסוכמות בטבלה. ערכים מודגשים של אישור רוחבי מובטח נלקח מ- GOST 1643-81.
mn, mm מרחק מרכזי מינימלי, mm
50 100 200 400 800 1600
1,5 90 120 110 140 - - - -
3 120 120 140 140 170 185 240 230 - -
5 - 180 140 210 185 280 230 - -
12 - - 350 290 420 360 550 500 -
18 - - - 540 360 670 500 940 780
שולחן. השוואה בין ערכי המרווח לרוחב המינימליים בתקן ISO / TR 10064-2 ו- GOST
כפי שניתן לראות מהטבלה, עם מודול שיניים mn \u003d 3 מ"מ, המרווח לרוחב המינימלי ב- ISO / TR 10064-2 והמרווח הרוחבי המובטח ב- GOST 1643-81
כמעט חופפים זה לזה. בשעה mn<3 минимальный боковой зазор по ISO/TR 10064-2 меньше, чем в ГОСТ 1643-81, mn>עוד 3.
ניתן לחשב את הערכים המופיעים בטבלה הסטנדרטית ב- ISO / TR 10064-2 באמצעות הביטוי:
GOST 1643-81 אינו מכיל תלות לחישוב ערכי הרווחיות לרוחב מובטחת, jnmin.
גם בפסקה הרביעית של ISO / TR 10064-2 ניתנת נוסחה לחישוב המרווח לרוחב:
כאשר EtSH1 ו- ETsPts2 הם הסטייה העליונה של עובי שן ההילוכים והגלגל, בהתאמה, ו- ap הוא זווית הפרופיל תקינה.
"פח הדק ושיעור המרווח הרדיאלי של ההילוכים והגלגל שווים, והערך של מקדם החפיפה הוא מקסימאלי." בניגוד לתקן ISO / TR 10064-2, ב- GOST 1643-81, החריגות הקטנות ביותר בעובי שן ההגה וההילוך לא יכולות להיות שוות, מכיוון שהן תלויות בקוטר המגרש, הערכים שבהם ההילוכים וההילוכים שונים.
הנקודה החמישית בתקן ISO / TR 10064-2: 1996 מוקדשת לנורמליזציה של עובי השן. בפרט בו ניתנות המלצות על קביעת עובי השן המרבי והמינימלי. בתקן GOST 1643-81 הרגיל שלנו, הנושא של נורמליזציה של עובי השן, בנוסף לערכי טבלאות של הסטייה הקטנה ביותר של עובי השן וסובלנות לעובי השן, אינו מטופל.
הסעיף השישי בתקן ISO / TR 10064-2 מכיל המלצות לתקנן מרווח רוחבי מרבי. ההגדרה של פרמטר דיוק זה ניתנת - "המרווח לרוחב המרבי בהנעת ההילוכים, jbnmax הוא סכום הסבילות לעובי השן, השפעת הסטיות של מרחק הסרן והשפעת הסטיות של גיאומטריה של השן והתנאי להתרחשותו:" המרווח הרוחבי המרבי התיאורטי מתרחש כאשר שני הילוכים באיכות גבוהה גלגלים שנעשו בהתאם לנורמה של עובי המינימום של השן מרושתים על המרחק המרבי המותר חופשי במרכז. " נוסחאות ניתנות לחישוב עובי השן המינימלי בפועל והמרווח הרוחבי ההיקפי המרבי, כמו גם הנוסחה להמרת המרווח היקפי למרווח הרוחבי הרגיל. נאמר גם כי "כל סטיות ייצור של השן תגדיל את המרווח הרוחבי המוערך. כדי להעריך ערכים מקובלים, נדרשת עבודת מחקר רצינית על בסיס מספר גדול של ניסויים. " מודגש כי "אם ברצונך לשלוט על המרווח לרוחב המרבי, עליך לבצע מחקר מעמיק של כל אחד ממרכיביו ומידת הדיוק שנבחרה המגביל את הסטיות של הגיאומטריה של שן הגלגל." הנורמליזציה של המרווח לרוחב המרבי ב- GOST 1643-81 מצטמצמת לערכי המרווח לרוחב מובטח, jnmin, והסובלנות למרווח רוחבי G, מומלץ לקבל מהביטוי:
הוראות תקן ISO / TR 10064-2 הינן מהוות ייעוץ, הוא אינו מכיל נתונים ספציפיים על תקינה. כמדדי אישור,
כאשר ТН1 ו- ТН2 הם סבולות לעקירה של גלגל ההילוכים והמתאר הראשוני.
משתמשים בערכי Esns ו- Tsn (סטייה עליונה בעובי השן וסובלנות בעובי שן הגלגלים). יש לנו א.ק.ס (הסטייה הקטנה ביותר בעובי השן) ו- Tc (סובלנות לעובי השן). הערכים של Esns ו- Tsn בתקן ISO / TR 10064-2 אינם סטנדרטיים ורק המלצות ניתנות לגבי שיטות לקביעתן. לפיכך, אימוץ המלצות אלה ללא פיתוח תקנים סטנדרטיים המספקים אישור לרוחב, פירושו דחיית השימוש בשיטות ובאמצעי המדידה של כל המדדים הניתנים בתקן שלנו, כלומר:
EHs (קיזוז נוסף הקטן ביותר של קווי המתאר המקורי);
Ewms (סטייה קטנה ביותר מהאורך הממוצע של הנורמלי הכללי);
איסלמות (סטייה הקטנה ביותר באורך הנורמלי הנפוץ);
Ea "" s (סטיית גבול עליונה של מרחק מרכז המדידה) ואחרים.
ההמלצות בתקן ISO / TR 10064-2 אינן מחברות את גודל הפער והנורמליזציה שלהן עם סוג ההזדווגות, סוג הסובלנות לפער לרוחב או עם סוג הסטייה של מרחק המרכז. עם זאת, הם דורשים חשבונאות חובה על טעויות בייצור והתקנה של חלקי הילוכים ללא הילוכים (מעטה, פירים, מיסבים וכו '), תנאי הילוכים, כמו גם סוג חומר סיכה, זיהומו, נוכחות של חלקים לא מתכתיים של הגלגלים ואלמנטים אחרים.
סיכום
בחינה מפורטת של תקן ISO / TR 10064-2: 1996 והשוואתו עם GOST 1643-81 מביאה אותנו למסקנה כי דחוף לפתח תקן ביתי המכיל סיבוכים ספציפיים לערכים מנורמליים, המאפשר שימוש מלא בציוד קיים לניטור הילוכים והילוכים. . על מסמך הרגולציה שצוין, בניגוד ל- GOST 1643-81, לעמוד בעקרונות הבסיסיים של המלצות תקן ISO. אי אפשר לארגן את ייצור ההילוכים וההילוכים רק על בסיס המלצות ISO מבלי להשתמש בתקן המקומי. התקן הקיים GOST 1643-81 במספר הוראות סותר באופן ישיר את ההמלצות שצוינו.
סִפְרוּת
1. ISO / TR 10064-2: 1996. הילוכים גליליים. קוד התרגול. חלק 2. בדיקה הקשורה לסטיות מרוכבות רדיאליות, מסלול ריצה, עובי שן וריסוס.
2. Timofeev B.P., Shalobaev E.V. המדינה והסיכויים לקיצוב דיוק ההילוכים וההילוכים. // עלון הנדסת מכונות. מס '12. 1990. ש' 34-36.
3. טישצ'נקו O.F., וולידינסקי א.ס. החלפות, סטנדרטיזציה ומדידות טכניות. M .: הנדסה, 1977.
4. Timofeev B.P., Shalobaev E.V. קביעת סוג הצימוד בהעברת ההילוכים ורגולציה של נורמות מרווח הצד. // שירות מטרולוגי בברית המועצות. מ .: הוצאה לאור של תקנים. 1990. גיליון. 2, עמ '27-31.
5. GOST 1643-81. הילוכים גליליים. סובלנות. מ., הוצאת תקנים, 1989.
6. יורייב Yu.A., Murashev V.A., Shalobaev E.V. הבחירה בסוג ההתאמה וההערכה ההסתברותית של התנועה המתה של ההולכה. L .: LITMO., 1977.28 ש '.
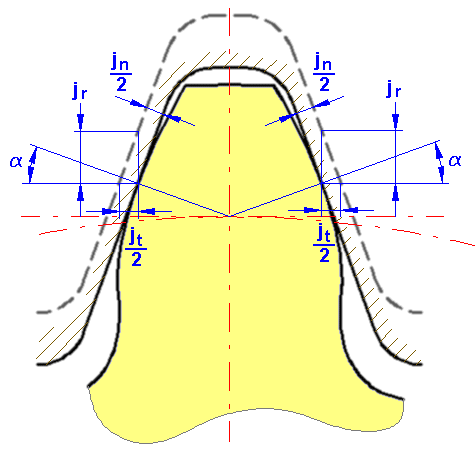
המרווח הרוחבי j n בין פרופילי השיניים סרק הגלגלים המתאימים נקבע בקטע בניצב לכיוון השיניים במישור משולב לגלילים הראשיים (איור 36). אישור אישור זה נדרש בכדי למנוע את החסימה בזמן ההילוך מחומם (פיצוי טמפרטורה), למקם את שכבת החומר סיכה, וכן לפיצוי על טעויות ייצור והרכבה. המרווח לרוחב מוביל להופעת הילוך אחורי במהלך הילוכים אחוריים, שערכו מוגבל להפחתת ההשפעות על פרופילי שיניים לא פעולות. ההילוכים התיאורטיים הינם דו פרופילים וללא נטייה לאחור (j n \u003d 0). להילוך בפועל צריך להיות אישור רוחבי.
הסכום המינימלי של מרווח רוחבי j n min קובע את סוג ההתאמה של השיניים. התקנים מספקים שישה סוגים של התאמה: A (עם מרווח מוגבר מוגבר jn min ל 3-12 מעלות דיוק), B (עם מרווח מובטח רגיל, 3-11), C, D (עם min min jn, 3-9, 3-8 ), Е (עם מינימום jn דקות, 3-7), Н (אפס דק 'דקות, 3-7).
נקבעו שמונה סוגים של סיבולות Tj n של אישור לרוחב (במקרה זה, Tj n \u003d
j n min - j n max): h, d, c, b, a, z, y, x. הסבילות בסדר עולה. סוגי זיווג H ו- E תואמים את סוג הסבילות h, סוגי זיווג D, C, B, A בהתאמה, d, c, b, a. מסיבות טכנולוגיות או אחרות מותר לשנות את ההתאמה בין סוגי ההזדווגות ואת הסבולות של הפער לרוחב, תוך שימוש גם בסוגי הסובלנות z, y, x (ראה איור 36).
נקבעות שש מחלקות של סטיות למרחקי הצירים, המסומנות בסדר יורד של דיוק במספרים רומיים מ- 1 ל- Y1. אישור פינוי רוחבי מובטח בכפוף לקבוע עבור סוג זה של מחלקות זיווג של סטיות למרחק הציר (מחלקות H, E - II, D, C, B, A - III, IY, Y, YI).
המרווח הרוחבי המינימלי j n min חייב לקחת בחשבון את פיצוי הטמפרטורה j nt ואת שכבת סיכה ס"מ:
j n min \u003d j nt + ראה (3.156)
איור 36 - מרווח צד בהילוך
ניתן לחשב את פיצוי הטמפרטורה הדרוש על ידי הכרת הטמפרטורה של ספירת t הגלגל ודיור ההילוכים t per ולקחת בחשבון כי המרווח הרוחבי j n נמדד בזווית הפרופיל :
t \u003d a w [ count (t count - 20 0) - cor (t count - 20 0)],
כאשר w הוא המרחק הבין-צבי, אני מקדמי ההתרחבות הליניאריים ( ספירת גלגלים, קורות).
בהתחשב בעובדה שעובי החומר סיכה צריך להיות בין 0.01 ל- 0.03 מודולים, אנו מקבלים כי המרווח הרוחבי המינימלי (מובטח) j n min צריך להיות שווה
j n min \u003d (0.01 0.03) m + a w [(( count (t count –20 0) - per (t per - 20 0) 2in (3.157)
צימוד מסוג B מבטיח מרווח רוחבי, שמונע את חסימה של שיני ההולכה מחמם כאשר הפרש הטמפרטורה בין הגלגלים לבית הוא 25 מעלות צלזיוס (ראה איור 36).
כדלקמן מהאמור לעיל, סוג זיווג השיניים מוקצה על ידי חישוב או בניסוי, ללא קשר למידת הדיוק. שגיאות מותרות בייצור או התקנת תיבת הילוכים, בהתאם למידת הדיוק, משפיעות על כמות המרווח הרוחבית המרבית.
ישנן שלוש שיטות למתן מרווח רוחבי: התאמת המרחק בין צירי ההילוכים, שימוש בכלים מיוחדים עם שיניים מעובות בייצור ושיטת העקירה הרדיאלית של קווי המתאר הראשוניים של מעקה כלי חיתוך ההילוכים.
השיטה הראשונה כמעט ולא נעשה בשימוש, מכיוון הזזת פירים עובדים לקבלת מרווח רוחבי מביאה לירידה בחלק הפעיל של הפרופיל ובמקדם החפיפה; שיטה זו אינה אפשרית עם מספר זוגות של שיניים מזדווגות היושבות על שני פירים מקבילים, מכיוון שהמרווח הרוחבי המותאם של זוג הילוכים אחד נותן ערכים פסולים עבור זוגות ההילוכים הנותרים.
השיטה השנייה להשגת שיניים של הילוכים "דקים" על ידי הגדלת עובי שיני החיתוך של הכלי (חותכים, מסילות וכדומה) מביאה לעלייה של הננומטוריה ועלות הכלי.
השיטה השלישית זכתה להפצה דומיננטית, מכיוון שהיא משתמשת בכלי סטנדרטי ומאפשרת לך לספק מרווחים לרוחב עקב העקירה הנוספת של כלי חיתוך ההילוכים ל"גוף "של חומר העבודה. המרווח הרוחבי הקטן ביותר נוצר על ידי הפחתת עובי השן לאורך האקורד הקבוע E בשיטת העקירה הרדיאלית של קווי המתאר המקוריים בערך E N. ירידה נוספת בעובי השן לאורך האקורד על ידי הסובלנות T s מתרחשת עקב הסובלנות בקיזוז קווי המתאר הראשוניים T N, הגורמת לעלייה מקבילה אישור רוחבי. התלות המאפיינות את השינוי במרווח הרוחבי מהעקירה של קווי המתאר הראשוני ודילול השן מוצגות באיור 36:
j n min \u003d 2 E H sin; (3.158)
E C \u003d 2E H tg. (3.159)
לפיכך, המרווח לרוחב נקבע על ידי תזוזת קווי המתאר המקור E N, המרחק המרכזי ו (נקבעות חריגות af a עבורו), עובי השן על מעגל המגרש או האקורד המתמיד של השן 
בנוכחות מסלול רדיאלי F r עובי השיניים אינו נשאר קבוע, אך משתנה עם הגישה והסרה לגלגל ההינע, לכן T N F r:
T H \u003d 1.1 F r + 20. (3.160)
המרווח לרוחב מורכב מרווח רוחבי מובטח j n min ומרווח רוחבי j n 1 כדי לפצות על שגיאות ייצור והתקנה (1 ו -2 - גלגלים והילוכים):
j n min + j n1 \u003d (Е Н 1 + Е Н 2) 2 sin. (3.161)
בהנחה שעקירת ההגה וההילוכים זהים בערך
Е Н 1 Е Н 2 Е Н, אנו משיגים ( \u003d 20 0):
המרווח הרוחבי j n 1 לוקח בחשבון את הסטיות של המרחק המרכזי f a, את גובה ההילוכים f p בשני גלגלים, הסטייה של הכיוון F של שני הגלגלים, סטיות מהמקבילות f x וההתאמה הלא נכונה של הצירים f y, j n 1 שווה למרובעת:
המרווח לרוחב הגדול ביותר הוא החיבור הסגור של השרשרת הממדית ההרכבה, אשר מרכיביה יהיו הסטיות של מרחק הציר ועקירת קווי המתאר המקוריים:
j n max \u003d j n min + (T H 1 + T H 2 + 2f a) 2sin. (3.164)
בהתחשב בצרכי הייצור, המדדים הבאים משמשים לאפיון המרווח לרוחב:
הקיזוז הקטן ביותר של קווי המתאר המקורי E נ (סובלנות T נ );
הסטייה הקטנה ביותר בעובי השיניים E מ (סובלנות T מ \u003d 0.73 ט נ );
הסטייה הקטנה ביותר באורך הממוצע של ה- E הרגיל הנורמלי wm (סובלנות T wm );
הסטייה הקטנה ביותר באורך ה- E הרגיל הנפוץ w (סובלנות T w );
סטיות מקסימליות של מרחק מרכז המדידה ה א (+ ה א `` s ו- -E א אני ).
W רגיל הוא המרחק בין המשטחים לרוחב ההפוכים של הקבוצה (2, 3 וכו ') של השיניים.
מדידת מרחק מרכז - מרחק ההתאמה ללא סיקול בין שיני הגלגל המבוקר וגלגל המדידה; E a ,, s \u003d  (תנודת מרחק המדידה בשן אחת); אה, אני \u003d -ט נ.
(תנודת מרחק המדידה בשן אחת); אה, אני \u003d -ט נ.
בפיתוח רישומי הילוכים, ארונות הילוכים, כוננים וכו '. האינדיקטורים w (E w, T w), S c (E c, T c) ו- f מוחלים (איור 36).
בעת ניטור הילוכים משתמשים בקבצי מחוונים המוגדרים לדרגות דיוק שונות. מתחמי בקרה שווים, אך אינם שווים. הראשון שבהם (לכל נורמה, שנוצרה על ידי מחוון מורכב אחד, נותן את ההערכה המלאה ביותר של דיוק ההגה). כל אחד מאחריו מאפיין נתח משמעותי מהטעות העיקרית או החלקים האישיים שלה.
הבחירה במתחם בקרה כזה או אחר תלויה במטרה ודיוק של הילוכים והילוכים (עקרון היפוך), מידותיהם, תרגול בקרה, נפח ותנאי ייצור וכו '. עבור המתחם שנבחר, הסבולות והסטיות הנדרשים מצוינים על גבי גלגל ההילוכים עם קווי מתאר ראשוניים לא סטנדרטיים ההגה נשלט מכל הבחינות.
ברישומי הילוכים עם קווי מתאר ראשוניים סטנדרטיים (איור 37), המעצב אינו מציין את אינדיקטורים של המתחם; אינדיקטורים אלה מוקצים על ידי שירותי טכנולוגיה.
שליטת ההילוכים יכולה להיות קבלה, מניעה וטכנולוגית.
בקרת קבלה - שלוט בביצועי המתחם.
מניעה - ניפוי תהליכים טכנולוגיים וזיהוי הגורמים לנישואין.
כדי לשלוט ברמת הדיוק הקינטית משתמשים במכשירים למדידת השגיאה הקינטית של הגלגלים, מרחק המדידה בין הסרנים, שגיאת המדרגות המצטברת, מסלול רדיאלי, תנודות באורך הנורמלי הכללי והטעות במערכת ההפעלה.
בבקרת החלקות בעבודה משתמשים במכשירים למדידת שגיאות קינמטיות ומחזוריות מקומיות, מגרש הילוכים, שגיאת פרופיל, סטיות של המגרש הזוויתי.
בבקרת שלמות המגע, מכשירים משמשים למדידת נקודת המגע הכוללת, המגרש הצירי, כיוון השיניים, שגיאת הצורה ומיקום קו המגע.
בבדיקת המרווח לרוחב, המכשיר מודד את העקירה של קווי המתאר הראשוניים, הסטייה של מרחק מרכז המדידה, סטיית האורך הממוצע של הנורמאלי השכיח, עובי השן (כולל קליפר).

איור 37 - ציוד